top of page

LANESHARK
The best of both worlds
An aspirational, safe
alternative to a street bike
What if the two most extreme driving experiences
were combined to create something more?




Feel like you own your own fighter jet for the road.



Simply removing a rear wheel on autocycles enables them to bypass regulations for easier registry, but can lead to a loss in stability and performance.
This enables a fun, open driving experience, but misses a significant opportunity.
Without minimizing their frontal area / footprint or leaning into turns, they combine the drawbacks of both cars and motorcycles and not the benefits.
The right combination of features will enhance the benefits and create a
"Less is More" scenario. More optimized freedom to move, more fun, and efficiency.

THE RIGHT RECIPE:
-Optimized minimal frontal area (narrow width, small footprint) to take up less space on the road and maximize efficiency and agility.
-Lean into turns for natural stability and a unique, exciting experience.
-Safety cocoon to protect against injury and the elements.
DEVELOPMENT PROGRESS:
Created multiple delta, tadpole and four-wheel prototypes and models with leaning & steering connected or separated:
Lean and steering action combined:





Four wheel lean to steer RC:



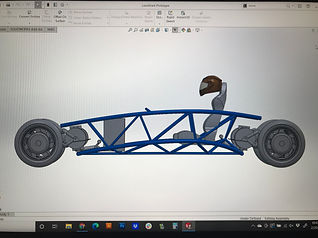
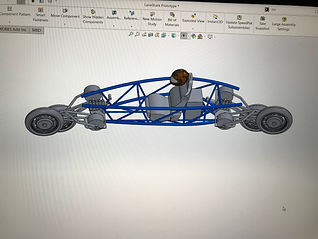
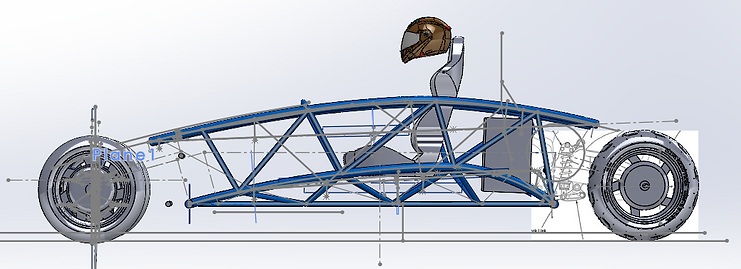
Four wheel lean to steer CAD:
Full-scale package overlay




For testing simplicity, three wheel lean to steer rear, independent front end driving prototype:











Full-scale mockup and layout with full-size prototype-grade parts:


Testing insights thus far:
-Rear steer is a lot of fun. HOWEVER, it was found to cause stability issues upward of 35 mph. Steering and leaning need to be separated.
-Looking further into how to control the rear steering, I came into contact with Robert Horn who created the famous "Rohorn Racer" dual-steering recumbent motorcycle.

-I learned that rear steering needs to be adjustable between going with or against the turn depending upon speed.
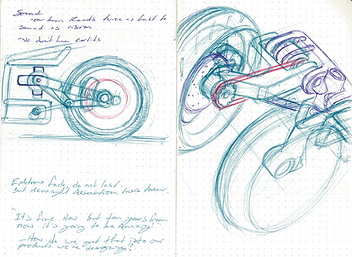
-Motorcycles induce lean by steering counter to the turn to move the center of mass inward of the contact patch, after being leaned over they then steer with the turn. They must also be able to turn their front wheel counter to the turn during high speed cornering, as demonstrated by this image:

-Robert found that below approximately 35 mph, it is best to have the rear wheel turn opposite the front wheel, and above 35, it is best to steer the rear wheel in the same direction as the front wheel. He made this adjustment pushing and pulling on a lever while driving.
.jpg)

Regarding legality of a four wheeled version, I had a few conversations with Craig Bramsher, founder of Brammo Motorcycles. During our conversation, I learned that he was the first person to import the Ariel Atom to the US. He had a terrible time working alongside his buyers to get these vehicles registered.


Because of this, he had an idea to create a three-wheeled version of the Ariel Atom and while he sold his electric motorcycle company to Polaris (which became the Victory Empulse), he also sold the plans for the three-wheeled Atom which became the Polaris Slingshot.


The Current Plan and Continued Progress:
Create a new tadpole design where steering and lean are separated:





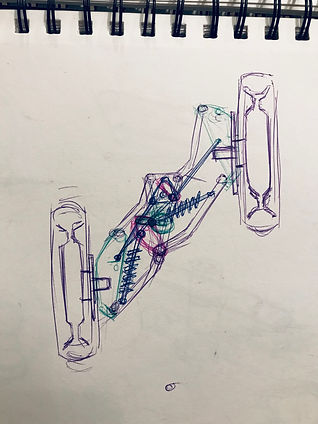
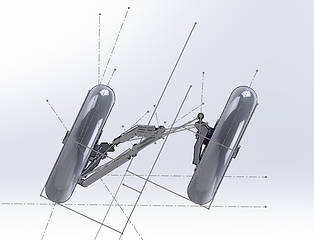
The new front end is loosely inspired by the WESLL leaning quad and is capable of tilting the body at 55 degrees in a turn. -Equivalent of moto GP racing levels, while tilting the front wheels less at 20 degrees for better contact with the road.
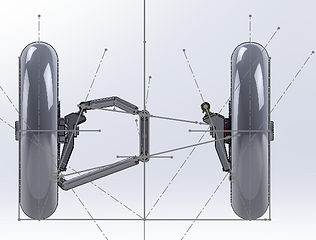


The front linked pushrod suspension will be rotated as a single assembly using an electronic power steering unit sourced from a Toyota Prius. This will be powered by a 12 volt car battery that will be charged using a step down converter from the main 72 volt lithium ion battery also powering the motors.

This power steering unit will be controlled by foot pedal inputs similar to an airplane or bobcat earth mover. Steering and throttle will be done by hand like a motorcycle.
Hardware I currently have:
-16 KW motor for rear
-Two 8KW motors for the front
-120 AH 72 volt Li-ion battery w/ charger
-All speed controllers, BMS, and throttle inputs, etc.
-Toyota Prius power steering unit
-Seat, hardware, suspension components / shocks, etc.
Next Steps:
-Complete front suspension initial design for prototyping.
-Rear end suspension and swingarm design / source from existing bike.
-Frame and general design of mounting for components
-Source DC-DC converter to charge 12v battery
Exterior ideation sketches for fun while in the process:












bottom of page